
IVER3 EP AUV – The IVER is a commercial AUV platform made by the OceanServer division of L3 Harris Technologies with a dual CPU configuration making it ideal for scientific research. The main CPU operates the vehicle like a standard vehicle where missions are designed in a proprietary software and uploaded to the vehicle to be carried out autonomously. Whereas, the backseat CPU (programmed by us) can be used to not only interface with custom sensor payloads, but can also interrupt/interact with the main CPU at all levels of control.

Autonomous BlueROV2 Heavy – This is the BlueROV2, commercially available from Blue Robotics, in the heavy configuration. However, the open source ROS operating software has been modified to provide autonomous control for anywhere from 3 to all 6 degrees of freedom depending on the pilot input configuration.
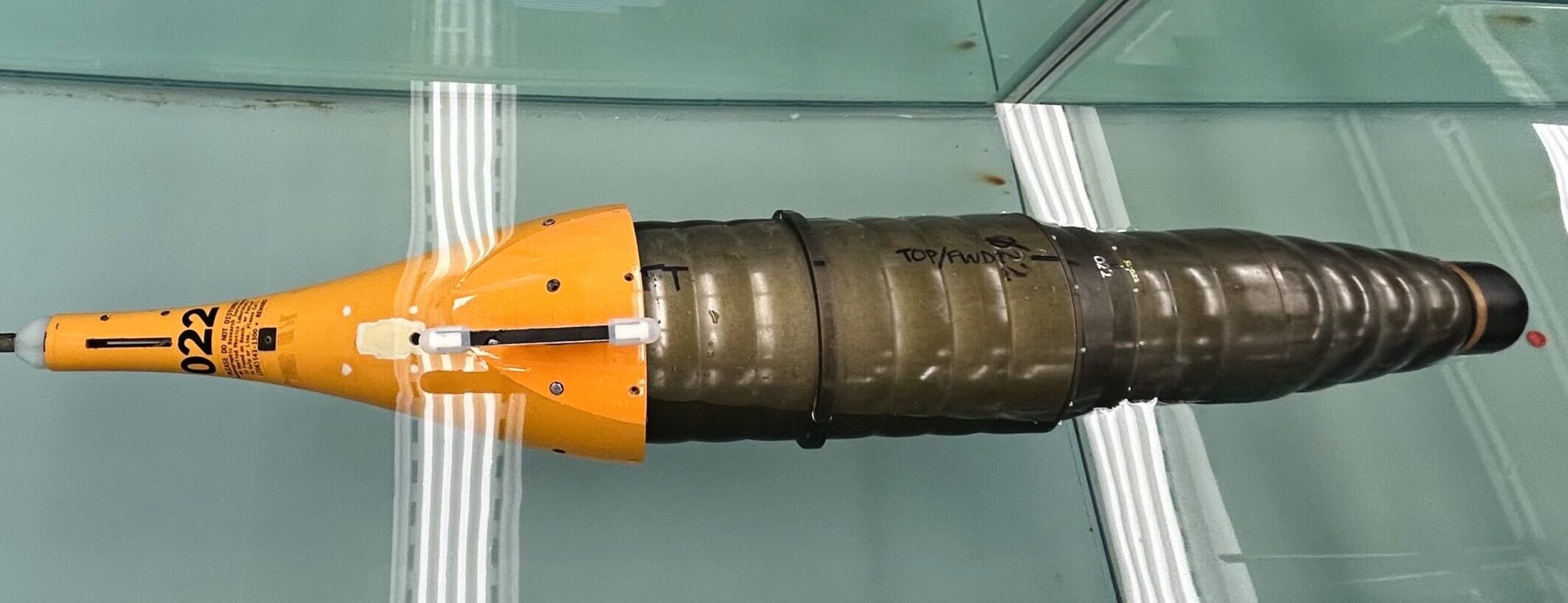
Glider of Theseus – This seaglider was created from the pressure housing and internal scaffolding of a no-longer functioning UW/APL model seaglider. However, all of the internal electronics and power hardware have been replaced with a custom system designed for autonomous ocean sampling.
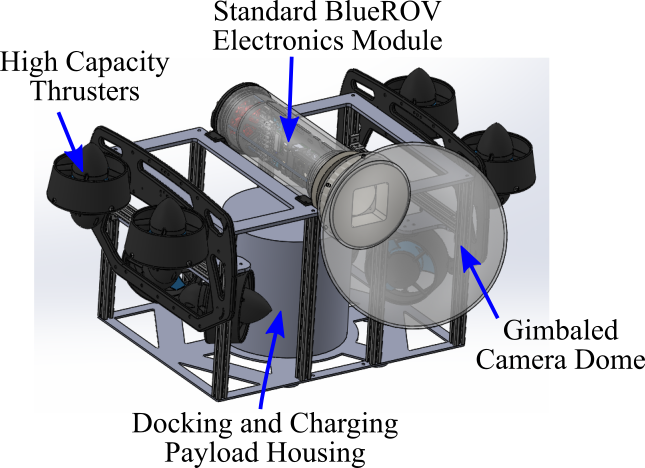 Custom High Capacity Blue ROV – Similar to the previous vehicle, this is built on the standard BlueROV2 architecture. However, this vehicle has a larger custom built frame, utilizes the larger capacity Blue Robotics T500 thrusters (rather than standard T200), contains an additional large payload module for docking and contactless charging, and has a large camera dome for a 3-axis gimbaled camera.
Custom High Capacity Blue ROV – Similar to the previous vehicle, this is built on the standard BlueROV2 architecture. However, this vehicle has a larger custom built frame, utilizes the larger capacity Blue Robotics T500 thrusters (rather than standard T200), contains an additional large payload module for docking and contactless charging, and has a large camera dome for a 3-axis gimbaled camera.