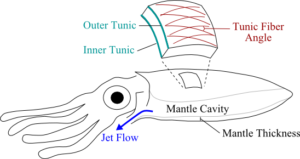
My work in soft robotic has focused on utilizing high tensile strength fibers to reinforce elastomeric materials and control their strain/deformation properties. This technology allows a soft structure to deform in a desirable way while preventing unwanted deformation, and was inspired by the morphology of squid mantle structures. The outer shell (mantle) of multiple species squid are reinforced with helical collagen fibers at a consistent orientation. I was able to show that this geometry provides maximum volume flux for a given muscle contraction, and hence maximum jet power; rather than maximum total jet volume as suggested by some previous researchers. The tunic fiber reinforcement also prevents mantle elongation eliminating a need for longitudinal muscles, and allowing for more circumferential muscles. Identifying the exact advantages of biological inspiration is key to successfully utilizing these advantages in engineered systems.
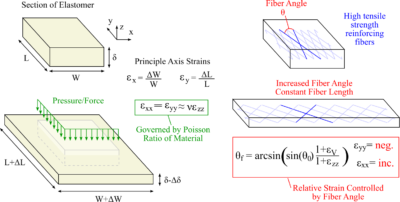
Inspired by the analysis I did on squid mantle structures, I developed the theory behind a new use for soft composites. In this methodology reinforcing fibers are not used to increase global stiffness, but rather to restrict the deformation space of flexible bodies and create soft structures with tunable, asymmetric strain relationships and Poisson ratios. This technology has been simulated to drastically improve the output or reduce the deformation work required for electro-active polymer actuators or other similar soft actuators.
Currently I hold a patent on this technology under reference #15/842,065