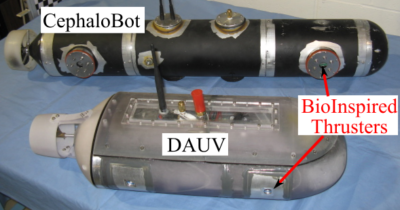
I have developed extensive experience designing, fabricating, and testing autonomous robotic systems, from my work with underwater vehicles. I have developed several generations of autonomous underwater vehicles (AUVs) to serve as both technology demonstrators for our bioinspired thrusters and platforms for testing the effectiveness of different control methodologies. The most recent AUV iterations are shown on the right. As can be seen from these AUV prototypes, one of the advantages of our jet propulsion technology is that the the thrusters are internal to the vehicle with only a small opening to the external fluid. Therefore the thruster does not affect the drag of the vehicle, while it is moving forward.

As part of my research I have also helped to develop/setup a large 65,000 gal vehicle testing tank (left). This testing tank is 23 ft in diameter and 16 ft deep, so it can hold multiple small scale AUVs performing tasks cooperatively. The tank has a platform running across one side to allow access to the water. I also created a custom cart that runs along the I-beam of this platform giving the setup towing tank testing capabilities.
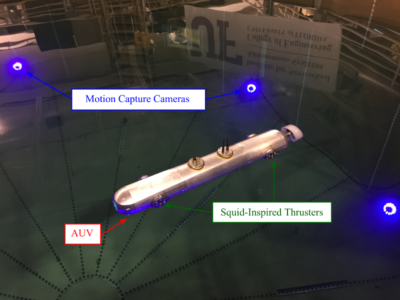
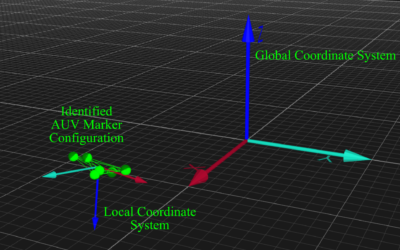
Marine robotics present unique challenges, most notably because of the attenuation of radio signals. In addition, due to the significant density of surrounding water, fluid interaction forces during operation are significant, highly sensitive to initial conditions, and difficult to model. In an effort to quantify propulsive efficiency, which is critical in this environment, I have taken several approaches to measuring system energetics. I have extensive experience using underwater motion capture systems to measure exact kinematics and hence inertial forces. I have used the kinematics data to calibrate hydrodynamic force models with respect to vehicle motion. On this page you can see a typical AUV being identified by the motion capture system and the virtual representation.
I have also created hybrid testing environments to operate prototype thrusters in static testing equipment, and use the measured forces to control virtual vehicles. Through this process I identified characteristic vehicle maneuvering regimes that call for different control strategies and different operating conditions of the novel jet thrusters.
Additionally, I have created a wave generator for the vehicle testing tank, which allows us to investigate AUV and controller performance in the presence of disturbances with varying frequency and amplitude. We have shown that the bioinspired jet thrusters are adept a compensating for high frequency disturbances where propeller thrusters struggle.